|
Peano
|
|
Peano
|
Functions | |
| template<class Shortcuts , typename T > | |
| void | getNormals (const T *Q, int direction, T &norm, T *n) |
| template<class Shortcuts > | |
| void | getStiffnessTensor (const double *Q, double &c11, double &c22, double &c33, double &c44, double &c55, double &c66, double &c12, double &c13, double &c23) |
| template<class Shortcuts > | |
| void | computeParameters (const double *Q, double &rho, double &cp, double cs[], int direction) |
| void | riemannSolverBoundary (int faceIndex, double r, double vn, double vm, double vl, double Tn, double Tm, double Tl, double zp, double zs[2], double &vn_hat, double &vm_hat, double &vl_hat, double &Tn_hat, double &Tm_hat, double &Tl_hat) |
| template<class Shortcuts , int order, int numberOfVariables, int numberOfParameters> | |
| void | riemannSolver (double *FL, double *FR, const double *const QL, const double *const QR, const double dt, const int direction, bool isBoundaryFace, int faceIndex) |
| template<class Shortcuts , typename T > | |
| void | computeParameters (const T *Q, T &rho, T &cp, T &cs, T &mu, T &lam) |
| template<typename T > | |
| void | riemannSolverBoundary (int faceIndex, T r, T vn, T vm, T vl, T Tn, T Tm, T Tl, T zp, T zs, T &vn_hat, T &vm_hat, T &vl_hat, T &Tn_hat, T &Tm_hat, T &Tl_hat) |
| template<class Shortcuts , typename T , int basisSize, int numberOfVariables, int numberOfData, int surface = 2> | |
| void | riemannSolver (T *FL, T *FR, const T *const QL, const T *const QR, const double dt, const int direction, bool isBoundaryFace, int faceIndex) |
| template<class Shortcuts , typename T > | |
| void | computeTractions (const T *Q, const T *n, T &Tx, T &Ty, T &Tz) |
| template<class Shortcuts , typename T > | |
| void | getVelocities (const T *Q, T &vx, T &vy, T &vz) |
| template<typename T > | |
| void | GramSchmidt (T *y, T *z) |
| template<typename T > | |
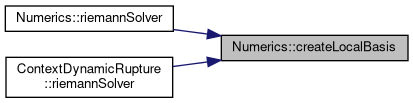
| void | createLocalBasis (T *n, T *m, T *l) |
| template<typename T > | |
| void | riemannSolverNodal (T v_p, T v_m, T sigma_p, T sigma_m, T z_p, T z_m, T &v_hat_p, T &v_hat_m, T &sigma_hat_p, T &sigma_hat_m) |
| template<typename T > | |
| void | riemannSolverBC0 (T v, T sigma, T z, T r, T &v_hat, T &sigma_hat) |
| template<typename T > | |
| void | riemannSolverBCn (T v, T sigma, T z, T r, T &v_hat, T &sigma_hat) |
| template<typename T > | |
| void | rotateIntoOrthogonalBasis (T *n, T *m, T *l, T Tx, T Ty, T Tz, T &Tn, T &Tm, T &Tl) |
| template<typename T > | |
| void | rotateIntoPhysicalBasis (T *n, T *m, T *l, T Fn, T Fm, T Fl, T &Fx, T &Fy, T &Fz) |
| template<typename T > | |
| void | computeFluctuationsLeft (T z, T myT, T T_hat, T v, T v_hat, T &F) |
| template<typename T > | |
| void | computeFluctuationsRight (T z, T myT, T T_hat, T v, T v_hat, T &F) |
| void Numerics::computeFluctuationsLeft | ( | T | z, |
| T | myT, | ||
| T | T_hat, | ||
| T | v, | ||
| T | v_hat, | ||
| T & | F ) |
Definition at line 172 of file riemannsolverRoutines.h.
References computeParameters().
Referenced by riemannSolver(), riemannSolver(), and ContextDynamicRupture< Shortcuts, basisSize, numberOfVariables, numberOfParameters, T >::riemannSolver().

| void Numerics::computeFluctuationsRight | ( | T | z, |
| T | myT, | ||
| T | T_hat, | ||
| T | v, | ||
| T | v_hat, | ||
| T & | F ) |
Definition at line 177 of file riemannsolverRoutines.h.
References computeParameters().
Referenced by riemannSolver(), riemannSolver(), and ContextDynamicRupture< Shortcuts, basisSize, numberOfVariables, numberOfParameters, T >::riemannSolver().

| void Numerics::computeParameters | ( | const double * | Q, |
| double & | rho, | ||
| double & | cp, | ||
| double | cs[], | ||
| int | direction ) |
Definition at line 25 of file riemannsolverAnisotropic.h.
Referenced by computeFluctuationsLeft(), computeFluctuationsRight(), computeTractions(), createLocalBasis(), GramSchmidt(), riemannSolver(), riemannSolver(), ContextDynamicRupture< Shortcuts, basisSize, numberOfVariables, numberOfParameters, T >::riemannSolver(), riemannSolverBC0(), riemannSolverBCn(), riemannSolverBoundary(), riemannSolverBoundary(), riemannSolverNodal(), rotateIntoOrthogonalBasis(), and rotateIntoPhysicalBasis().
| void Numerics::computeParameters | ( | const T * | Q, |
| T & | rho, | ||
| T & | cp, | ||
| T & | cs, | ||
| T & | mu, | ||
| T & | lam ) |
Definition at line 10 of file riemannsolverIsotropic.h.
Definition at line 6 of file riemannsolverRoutines.h.
References computeParameters().

Definition at line 44 of file riemannsolverRoutines.h.
References computeParameters(), and GramSchmidt().
Referenced by riemannSolver(), riemannSolver(), and ContextDynamicRupture< Shortcuts, basisSize, numberOfVariables, numberOfParameters, T >::riemannSolver().

Definition at line 5 of file cartesianRoutines.h.
| void Numerics::getStiffnessTensor | ( | const double * | Q, |
| double & | c11, | ||
| double & | c22, | ||
| double & | c33, | ||
| double & | c44, | ||
| double & | c55, | ||
| double & | c66, | ||
| double & | c12, | ||
| double & | c13, | ||
| double & | c23 ) |
Definition at line 11 of file riemannsolverAnisotropic.h.
Definition at line 20 of file riemannsolverRoutines.h.
Definition at line 29 of file riemannsolverRoutines.h.
References computeParameters().
Referenced by createLocalBasis().


| void Numerics::riemannSolver | ( | double * | FL, |
| double * | FR, | ||
| const double *const | QL, | ||
| const double *const | QR, | ||
| const double | dt, | ||
| const int | direction, | ||
| bool | isBoundaryFace, | ||
| int | faceIndex ) |
Definition at line 83 of file riemannsolverAnisotropic.h.
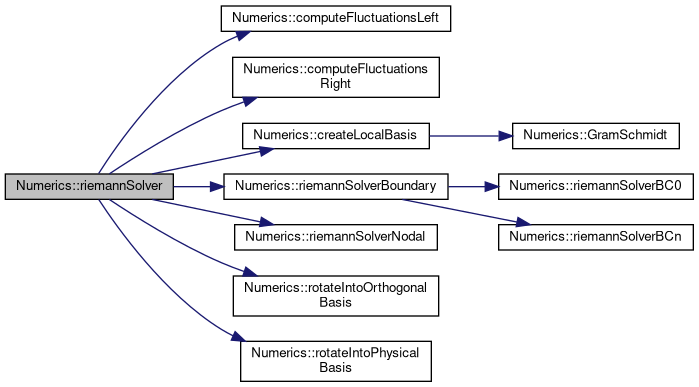
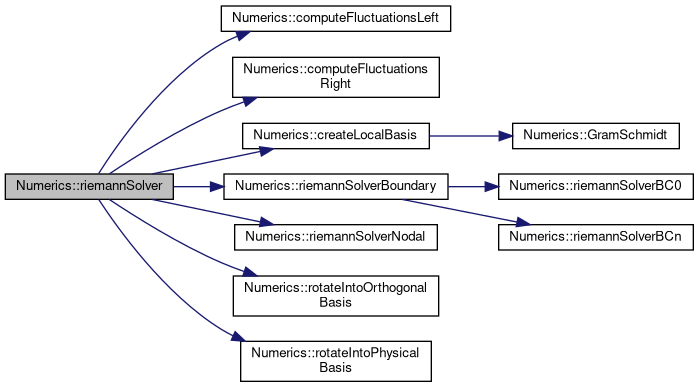
References computeFluctuationsLeft(), computeFluctuationsRight(), computeParameters(), createLocalBasis(), riemannSolverBoundary(), riemannSolverNodal(), rotateIntoOrthogonalBasis(), and rotateIntoPhysicalBasis().
| void Numerics::riemannSolver | ( | T * | FL, |
| T * | FR, | ||
| const T *const | QL, | ||
| const T *const | QR, | ||
| const double | dt, | ||
| const int | direction, | ||
| bool | isBoundaryFace, | ||
| int | faceIndex ) |
Definition at line 53 of file riemannsolverIsotropic.h.
References computeFluctuationsLeft(), computeFluctuationsRight(), computeParameters(), createLocalBasis(), riemannSolverBoundary(), riemannSolverNodal(), rotateIntoOrthogonalBasis(), and rotateIntoPhysicalBasis().
| void Numerics::riemannSolverBC0 | ( | T | v, |
| T | sigma, | ||
| T | z, | ||
| T | r, | ||
| T & | v_hat, | ||
| T & | sigma_hat ) |
Definition at line 129 of file riemannsolverRoutines.h.
References computeParameters().
Referenced by riemannSolverBoundary(), and riemannSolverBoundary().


| void Numerics::riemannSolverBCn | ( | T | v, |
| T | sigma, | ||
| T | z, | ||
| T | r, | ||
| T & | v_hat, | ||
| T & | sigma_hat ) |
Definition at line 141 of file riemannsolverRoutines.h.
References computeParameters().
Referenced by riemannSolverBoundary(), and riemannSolverBoundary().


| void Numerics::riemannSolverBoundary | ( | int | faceIndex, |
| double | r, | ||
| double | vn, | ||
| double | vm, | ||
| double | vl, | ||
| double | Tn, | ||
| double | Tm, | ||
| double | Tl, | ||
| double | zp, | ||
| double | zs[2], | ||
| double & | vn_hat, | ||
| double & | vm_hat, | ||
| double & | vl_hat, | ||
| double & | Tn_hat, | ||
| double & | Tm_hat, | ||
| double & | Tl_hat ) |
Definition at line 49 of file riemannsolverAnisotropic.h.
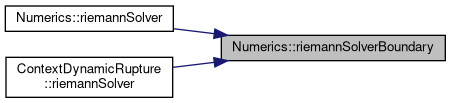
References computeParameters(), riemannSolverBC0(), and riemannSolverBCn().
Referenced by riemannSolver(), riemannSolver(), and ContextDynamicRupture< Shortcuts, basisSize, numberOfVariables, numberOfParameters, T >::riemannSolver().

| void Numerics::riemannSolverBoundary | ( | int | faceIndex, |
| T | r, | ||
| T | vn, | ||
| T | vm, | ||
| T | vl, | ||
| T | Tn, | ||
| T | Tm, | ||
| T | Tl, | ||
| T | zp, | ||
| T | zs, | ||
| T & | vn_hat, | ||
| T & | vm_hat, | ||
| T & | vl_hat, | ||
| T & | Tn_hat, | ||
| T & | Tm_hat, | ||
| T & | Tl_hat ) |
Definition at line 19 of file riemannsolverIsotropic.h.
References computeParameters(), riemannSolverBC0(), and riemannSolverBCn().

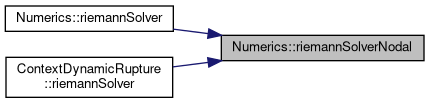
| void Numerics::riemannSolverNodal | ( | T | v_p, |
| T | v_m, | ||
| T | sigma_p, | ||
| T | sigma_m, | ||
| T | z_p, | ||
| T | z_m, | ||
| T & | v_hat_p, | ||
| T & | v_hat_m, | ||
| T & | sigma_hat_p, | ||
| T & | sigma_hat_m ) |
Definition at line 81 of file riemannsolverRoutines.h.
References computeParameters().
Referenced by riemannSolver(), riemannSolver(), and ContextDynamicRupture< Shortcuts, basisSize, numberOfVariables, numberOfParameters, T >::riemannSolver().

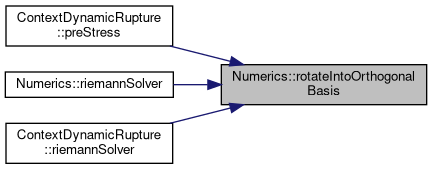
| void Numerics::rotateIntoOrthogonalBasis | ( | T * | n, |
| T * | m, | ||
| T * | l, | ||
| T | Tx, | ||
| T | Ty, | ||
| T | Tz, | ||
| T & | Tn, | ||
| T & | Tm, | ||
| T & | Tl ) |
Definition at line 153 of file riemannsolverRoutines.h.
References computeParameters().
Referenced by ContextDynamicRupture< Shortcuts, basisSize, numberOfVariables, numberOfParameters, T >::preStress(), riemannSolver(), riemannSolver(), and ContextDynamicRupture< Shortcuts, basisSize, numberOfVariables, numberOfParameters, T >::riemannSolver().

| void Numerics::rotateIntoPhysicalBasis | ( | T * | n, |
| T * | m, | ||
| T * | l, | ||
| T | Fn, | ||
| T | Fm, | ||
| T | Fl, | ||
| T & | Fx, | ||
| T & | Fy, | ||
| T & | Fz ) |
Definition at line 162 of file riemannsolverRoutines.h.
References computeParameters().
Referenced by riemannSolver(), riemannSolver(), and ContextDynamicRupture< Shortcuts, basisSize, numberOfVariables, numberOfParameters, T >::riemannSolver().